可動化の基本:どこに何の関節を入れるか
可動フィギュアは「関節の種類」と「位置」で決まります。まずは動かしたい箇所と、それぞれに合う関節を決めましょう。
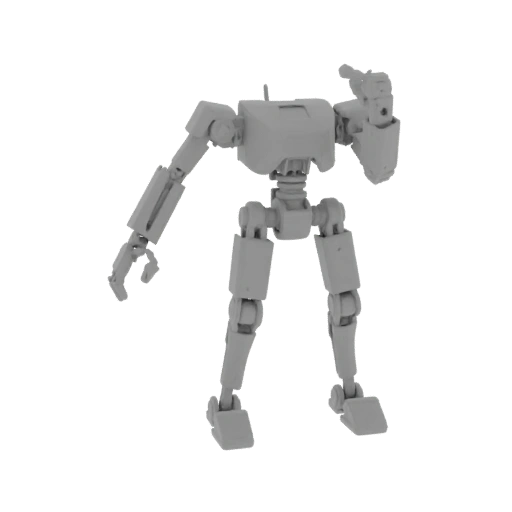
- 肩・股関節・首:全方向に動く ボールジョイント が向く
- 肘・膝:1 方向に曲がる ヒンジ が自然
- 差し替え・保持:ポリキャップ で勘合の保持力を持たせる
手順
1
モデルをドロップ
自作フィギュアやパーツの STL / OBJ をアップロードし、3D プレビューで全体を確認します。
2
関節を選んで配置
ボールジョイント・ヒンジ・ポリキャップから選び、動かしたい箇所にクリックで配置します。
3
ゴースト表示で位置決め
確定前にゴースト表示で位置と向きを確認。合わない軸を作ってしまう失敗を防げます。
4
印刷準備して出力
必要なら分割+ダボや中空化を続け、STL でダウンロードしてスライサーへ。
印刷後にちゃんと動かすコツ
可動部は「クリアランス(隙間)」が命です。きつすぎると差し込めず、緩すぎるとポーズが保持できません。小さなテストピースで勘合の固さを一度確かめてから本番を印刷すると失敗しません。
- ボール径は、保持力と可動範囲のバランスで決める(小さすぎるとヘタりやすい)
- 塗装する場合は塗膜のぶんクリアランスを少し広めに取る
- 軸の根元が細いと折れやすいので、肉厚チェックで弱点を事前に確認する
まとめ
可動化は「関節の種類を選ぶ → 位置をゴーストで確認 → クリアランスをテスト」の 3 点を押さえれば難しくありません。まずは肩や股関節など大きな可動部から、手元のモデルで試してみてください。
登録もインストールも不要。STL / OBJ をドロップするだけで 3D プレビューが立ち上がります。
無料で可動ジョイントを追加する →